
编码器从伺服编码器口接到电机编码器口,根据编码器信号,有些可能要加装中间转换装置 。
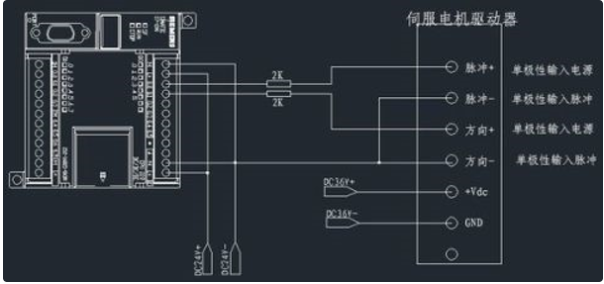
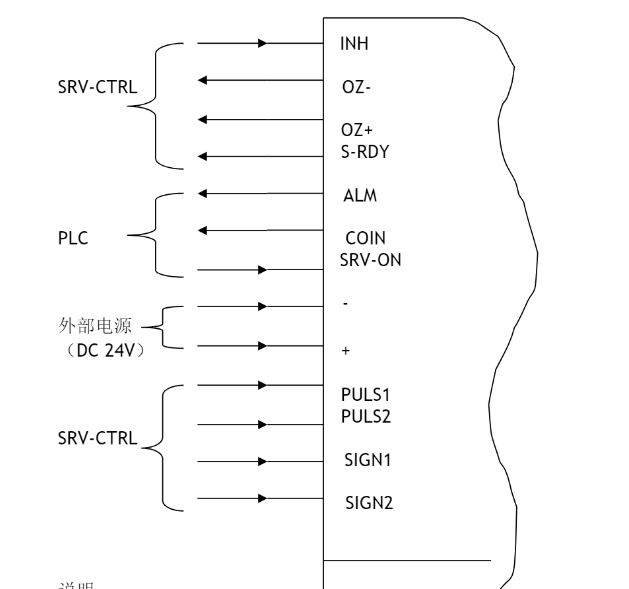
在工控自动化领域中很多设备都有着严格的安装规范,那么为了尽最大可能避免使用风险,消除安全隐患,连接伺服驱动器有哪些规则?
4.接地线,尽可能粗,做成单点接地。伺服电机的接地端子必须与驱动器的接地端子PE连接。
(2)电涌抑制器一定得安装在继电器、交流接触器、制动器和其他线)电源电路电缆和信号线不应绑在一起。
伺服驱动器是搭配伺服电机一起使用的,用来控制伺服电机的一种控制器。它是属于伺服系统的一部分,在工业领域发挥着很重要的作用。所以,客户在购买了伺服驱动器后必须要知道一些常见的故障和处理方法,遇到类似问题才能迅速处理。今天环通机电小编就跟大家伙儿一起来分享一下关于伺服驱动器的维修方法。
简单的总结了几个常见的伺服驱动器故障以及处理方法,你学会了吗?以后遇到类似问题就可以轻松处理了。
关键字:引用地址:伺服驱动器外部接线图_伺服驱动器故障及维修上一篇:无刷电机有啥好处 无刷电机类型有哪些 无刷电机工作原理下一篇:电液伺服阀频率测试_电液伺服阀结构图
伺服控制器怎么调 伺服控制器的调试应该要依据具体应用场景和控制器型号进行具体设置和调整。一般来说,伺服控制器的调试包括以下几个方面: 电气参数调整:包括电机的参数设置和校准、驱动器参数的设置、电源的输出调整等。这些参数的设置需要根据具体控制器的说明书和应用场景做调整。 控制模式选择:伺服控制器通常有多种控制模式可供选择,例如位置控制模式、速度控制模式、力矩控制模式等,应该要依据实际应用场景进行选择。 PID参数调整:伺服控制器通常采用PID控制算法,需要结合实际应用场景进行PID参数的设置和调整,以获得更好的控制性能。 运动参数调整:包括加速度、减速度、最大速度等运动参数的设置和调整,应该要依据实际应用场景进行
引言 现代工业自动控制系统朝智能化、网络化和开放式结构的方向发展。利用现场总线技 术,将符合同一标准的各种智能设备统一起来,彻底实现整个监测系统的分散控制,将提高系统集成度和数据传输效率、延长有效控制距离,并有利于提高系统抗干 扰性能和扩展系统功能。在运动控制中,伺服电机以其响应速度快,控制精准等优点以被更多的客户所选用。如果把总线通信与伺服控制技术统一起来,将推动运动控制技术和设备远程监控技术的发展。MODBUS作为一种通用的现场总线,已得到很广泛的应用,很多厂商PLC、智能I/O与A/D模块具备MODBUS通讯接口。本文在阐述MODBUS通信协议的基础上,构建了基于MODBUS的伺服电机运动控制。
FLASH地址线位存储空间。重映射后定位于0x400000-0xFFBFFFFF之间。 1.8位存储器地址A0-A23有效;16为存储器地址A1-A23有效 2.NCS0所选的器件复位后被映射在地址0X00,复位后(NRST释放)系统有NCS0连接的存储器启动。若存储器为8位,则BMS为1;若存储器为16位,则BMS位0。 3.RAM存储器复位后定位于0x300000。重映射后定位于0x0。 4.扩展存储器位置由片选寄存器EBI_CSRx决定。 5.存储器重映射后存储器定位方法。片选寄存器0(CHIPSELECT REGISTER 0)的EBI_BA位包含base addres 的最高位,例如:flash_bas
Mini-USB线缆连接器作为一种常见的USB(通用串行总线)线缆连接器,大范围的应用于各种电子设备之间的连接和通讯。 Mini-USB线缆连接器通常用于实现传输线缆与待连接设备之间的电连接,线缆连接器包括绝缘本体和设置于绝缘本体中的多个导电端子。传输线缆的一端与线缆连接器中的导电端子电连接,另一端从线缆连接器中引出至线缆连接器外部。 现存技术中,传输线缆的外层绝缘皮一般与线缆连接器的绝缘绝缘本体一体注塑成型以实现传输线缆与线缆连接器的相对固定,在这种设计的具体方案下,线缆无法相对线缆连接器进行转动。因此,在空间狭窄的位置插入线°弯折传输线缆。 而反复弯折容易造成线缆绝缘皮破损和芯线断裂等不良,且存在比较大的安全隐患。为
容易断裂怎么办?联纲光电发明Mini-USB线缆连接器 /
可以看出如果机械结构确定了,这个值也是确定的,1个脉冲对应走的位移是确定的,即系统的精度是确定的。如5mm导程的丝杠,与亿维伺服驱动直接连接的线mm。 一、PLC控制器频率与伺服驱动器和负载转速 已知伺服驱动器Pm=10000Pulse/r,PLC控制器发出的频率f (puls/s),如何计算负载轴的转速n(r/s), 当伺服电机直接连接轴,设电子齿轮比分子比分母为N。 n=(f*N)/Pm ...........此公式求出单位为r/s,1s发的脉冲数除以一圈需要的脉冲数=1s转动的圈数。 n :负载转速,单位:r/s。 f:控制器发出的频率,单位:pls/s。 N:驱动器电子齿轮比。 Pm:伺服驱动
和负载转速 /
伺服驱动器(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分, 主要使用在于高精度的定位系统。 一般是通过位置、速度和力矩三种方式对伺服电机来控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 基本介绍 伺服驱动器是现代运动控制的重要组成部分,被大范围的应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器慢慢的变成了国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制管理系统,特别是速度控制性能的发挥起
深圳某自动化有限公司在国内的一个运行项目中,项目要求控制中心系统通过向直流伺服驱动器,发送不同的命令报文控制驱动器的启停和工作速度,进而控制驱动器下端连接的四台伺服电机的转动速度。控制中心系统使用的是西门子 S7-1200 PLC,支持 Profinet 总线协议,直流伺服驱动器支持 CAN 协议 解决方案: 由于直流伺服驱动器正常工作时支持 CAN 协议通讯,控制中心系统西门子 S7-1200 PLC 支持 Profinet总线协议通讯,作为 Profinet 主站,两种协议不同,不能直接连接实现数据交换,需通过第三方协议转换模块才能实现不同协议间的数据交换。 北京倍讯科技自主研发生产的Profinet转Can网关能够实现
通讯案例 /
由于变频器输出的电压波形是类似于正弦波,而绝非真正的正弦波。其波形中含有大量的谐波成分,特别是高次谐波会使变频器输出电流增大,造成电机绕组发热,产生振动和噪声,加速绝缘老化,更不可思议的是可能损坏电机;同时各种频率的谐波会向空间发射不同程序的无线电干扰,因此,有一定的概率会导致其它机电设施的误动作。因此,在安装变频器时,需要综合考虑中心控制室、变频器、电机三者之间的距离,才能最好能够降低谐波的影响,提高控制的稳定性。 (一)距离的定义:1、近距离:变频器和电机之间的距离≤20m;2、中距离:变频器和电机之间的距离》20m,并且≤100m;3、远距离:变频器和电机之间的距离》100m; (二)工业使用现场的场合:1、近距离:变频器和电机之间可以
嵌入式工程师AI挑战营(初阶):基于RV1106,动手部署手写数字识别落地
有奖直播 瑞萨新一代视觉 AI MPU 处理器 RZ/V2H:高算力、低功耗、实时控制
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
4 月 19 日消息,据韩媒 Sedaily 报道,三星电子通过旗下三星综合研究院(SAIT,Samsung Advanced Institute of Technology)在美 ...
一、定义与作用视频拼接控制器也称视频处理器,在液晶拼接屏中起了重要的作用,它是大屏拼接系统中的核心设备,但正如主机需要CPU一样,液晶 ...
100W音频功率放大器由运算功率放大器集成电路LM12CLK供电。该单片IC可以向 4Ω 负载提供 80W 正弦波功率,失线%。功率带宽为 ...
构建放大器简单,使用标准且稳定可靠。这里介绍的 75 W 放大器电路能够驱动 4 欧姆,但是,尽管用于 4 欧姆,该放大器的误差非常小 ...
这是一款8Ω负载下的12W小型功率放大器,将NE5534集成技术与晶体管作为V-MOSFET输出级相结合,获得出色的音质。输入灵敏度最大为 3Vrms,1 ...

英特尔至强和AI PC等产品为Meta Llama 3生成式AI工作负载提供加速
STM32与Actility ThingPark的合作实现高效的无线固件更新
消息称三星电子在硅谷开设先进处理器实验室,聚焦 RISC-V IP 开发
三星计划将 TC-NCF 用于 16 层 HBM4 内存生产,将推整体 HBM 定制服务
报名有礼:【TI C2000在实时控制管理系统中的新特性】网络直播诚邀您参与!
直播已结束|Molex 和 TTI 更小型、高速、可靠的连接器推动物联网应用的新发展
总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科词云:
